
摘要:无人驾驶的三个“彷徨”:是否允许路测的彷徨、普及难度与数量才能引发质变的彷徨、专注安全与不断增加安全难点的彷徨。

自动驾驶就像一个初入风尘便被吹捧的青楼花魁,这些年不知“勾引”了多少的商场老饕。
曾在通用汽车公司任职的Google公司顾问密歇根大学工程学教授Larry Burns说:“这是一场军备竞赛。”但很可惜的是这场军备战争似乎还要打很久。
如果说诺曼底战役是改变第二次世界大战的转折点,那么当下自动驾驶技术的发展智能勉强算得上是造船期,仍然停留在硬件基础的摸索,小打小闹的试试还可,真正“冲锋陷阵”的决胜之役尚不能为。
无人驾驶的三个“彷徨”
自动驾驶属于技术于硬件碰撞的产物,是在物联网、云计算、大数据、人工智能等技术与传统汽车制造工业深度融合下产生的。以其便捷、高效、智能等特点,毫无疑问的成为交通领域未来发展的风向标,成为全世界级的持久风口。
全球汽车行业公认的汽车自动驾驶技术分级标准有两种,就目前来说比较普及的是由国际自动机工程师学会(简称SAE)提出的。
SAE将自动驾驶分为L0—L5六个级别,而其中只有达到L5的完全自动化才能满足用户的全场景实际需求。
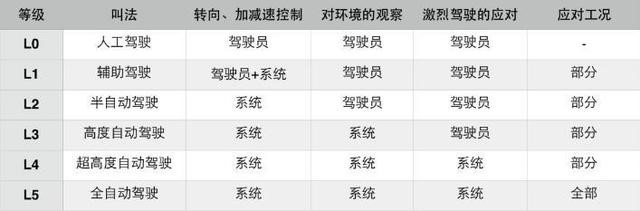
(SAE自动驾驶分级)
从L0到L5,其中的细分判断点有很多,但总的来说最大的特征就是场景的全面化推进,比如L4与L5最大的差距就是L4在某些场景下还需要人工干预,而L5是完全的不需要人工。
就目前而言,大部分自动驾驶都处于L3阶段中,国内自主品牌L3级量产车预计都在今年以后上市,如广汽新能源和一汽红旗都表示在今年推出L3级自动驾驶量产车型。而L4级别的车辆的场景更加苛刻,只能局限在少数特定的测试地点才能达到L4级别。
也正是这种不成熟的发展现状,导致了目前自动驾驶有着不少的发展痛点,这些痛点具体表现在三个彷徨上。
是否允许路测的彷徨
这第一个彷徨来自于监管层。作为技术导向的自动驾驶,本身的研究及发展都需要大量的实测数据进行支撑,但对于很多自动驾驶落地的汽车产品而言,本身的不确定性使得其在路测阶段存在发生事故的可能性。
实际的路测不像是在测试点,有着特定的障碍物与路况,正如驾照考试科目三的路考一样,难点就在于如何处理可能出现的突发状况。
但就目前而言,这种自动驾驶混杂着实际路况本身的风险可能会导致发生交通事故,也因此大多数地方对于自动驾驶的路测都有着严格的规定。
不过自动驾驶始终是未来确切的发展方向,无论是国内外,只要是一流的汽车企业或者像谷歌、百度等互联网企业,都在对此倾注着大量的资源与精力。放宽自动驾驶的路测规定无疑是吸引它们的最大诱饵。
就像去年美国加州车管所(DMV)颁布了全球首个可以不配备安全员的完全无人驾驶牌照,并且允许无人驾驶汽车免费接送乘客。这就使得无论是大众、奔驰、通用、本田、上汽等传统车企,还是谷歌、百度、苹果等科技公司都纷纷在此设置办事处,并积极开展道路测试。
在国内随着2017年12月北京交通委正式印发《北京市关于加快推进自动驾驶车辆道路测试有关工作的指导意见(试行)》,标志着北京正式成为我国第一个允许无人驾驶在公共道路开展测试的城市。也吸引了百度、蔚来、北汽新能源、小马智行、戴姆勒、腾讯、滴滴、奥迪等多家公司目前都在北京进行积极的路测,仅在2018年这些公司在北京道路上的测试总里程超过了15万公里。
大量的造车先锋军与互联网科技公司的用户无疑可以带动当地GDP的增长,促进就业与消费的良性发展,这实际就与可能发生的车祸形成了一种矛盾,也促使了监管方为了促进自动驾驶的发展,必须投入更多的精力与资源去规范自动驾驶的路测环境。
普及难度与数量才能引发质变的彷徨
前面提到的自动驾驶车祸也成为了诱导新痛点的产生,这些年来自动驾驶发生的事故没有一百也有几十,以下为三个较为典型的案例。
第一起发生在2016年5月7日,一辆2015款特斯拉 Model S 在佛罗里达州高速公路上与一辆垂直方向开来的挂车发生相撞。调查报告称,在强烈的日照条件下,驾驶员和自动驾驶系统都未能注意到拖挂车的白色车身,因此未能及时启动刹车系统。
第二起发生在2017年3月24日,一辆Uber自动驾驶试验车在亚利桑那州坦佩市一处十字路口处,由北向南行驶的Uber自动驾驶汽车与一辆东西行驶试图左拐的普通汽车发生了碰撞。这一事故是由人类司机并未让行直行的自动驾驶车辆所致。
第三起发生在2018年1月10日,由福特投资的Argo AI公司在美国宾夕法尼亚州匹茨堡发生了一起交通事故,事故最终导致两人受伤。截止目前,当局认定这起事故是人为失误造成的,事故起因是一辆卡车闯红灯。
而以时间顺序来看这三起事故,可以看出随着时间的推进,自动驾驶在路测阶段时的事故诱因已经从最开始的技术不成熟发展到了行人或其他车辆的不规范交通行为导致。而纵观2017-2018的大部分自动驾驶事故,已然是更多地人为因素主导,自动驾驶车辆往往承担着“无妄之灾”。
庞大的司机群体中有不少司机存在不规范驾驶的行为,电动车大军更是在道路上肆意奔腾,还有更为荒诞的中国式过马路以及碰瓷等。
这也是一种技术的无奈,可以改变自己,无法改变其他人,自动驾驶的未来生态中,要做到的是全方位的车联网,每辆车都要具备这种实时连接的属性才能保证在中枢处理器下每辆车都可以平稳运行,交通顺畅。
即使放眼未来,自动驾驶的普及也一直是个难题。
美国计算机科学家、图灵奖得主Alan Kay曾说过,“People who are really serious about software should make their own hardware.”意思是,真正在乎软件的人,应该去制造属于自己的硬件。这句话后来被乔布斯用于表达苹果的产品开发理念。
但手机毕竟是个相对价值较低的智能硬件,all in进去的成本较低,而自动驾驶汽车单价与研发成本远远超过手机,不仅前期投入大,而且生产周期长,很难在短时间内取得产品上的成绩。这与互联网商业中资本投入与产值之间的正比例关系相悖。
对于一个完整的汽车产业链周期,从上游的源材料采集、技术开发;到中游的配件制造组装;再到下游的产品销售,这一整条的产业结构都不是短时间内能堆砌的。这也导致着产品最终定价会带着研究开发成本,价格势必短期内很难大众化。
就像如今新能源汽车一般,即使大家都知道这是有益与环境且符合未来交通发展的正确方向,但实际而言燃油车已然是购车主选,因为在综合汽车寿命、消耗油钱、车辆配置与价格等各方面因素,燃油车在价格上始终有着绝对的性价比。
因此对于自动驾驶而言,自己本身就是一个普及数量会引发质变的行业,但在普及难度上却存在着较大的难点,这就是自动驾驶的第二个彷徨。
专注安全与不断增加安全难点的彷徨
前面提到过,自动驾驶的全面推行必须是依托在车联网之上的,依托于大数据与AI分析,提升整个交通大环境的安全性,但同样的联网意味着变相增加了被黑客攻击的风险。
在之前《速度与激情8》电影中出现黑客“控制”自动驾驶的汽车向对手发起攻击的情节时自动驾驶安全问题就已经广泛的引发了用户热议。而对于自动驾驶来说,本身就是从车内网、车际网等网络主导的形式,数据与网络是其运行的血液与血管,也就是从骨子里就存在信息安全问题。
而早在2015年,安全专家Kevin Mahaffey和Marc Rogers演示了通过Model S存在的漏洞打开车门、启动并成功开走,此外还能向Model S发送“自杀”命令,在车辆正常行驶中突然关闭系统引擎让车辆停下来。
要知道这还是在特斯拉Model S在设计之初就将安全摆在非常重要的位置,但即使如此依然存在被攻克的漏洞。自动驾驶智能生态存在信息数据丢失或泄露、病毒木马摧毁网络、服务攻击造成云计算平台服务中断等可能,因此在自动驾驶的发展进程中,丝毫不能放松对安全方面的深耕。
从宏观上来说,近年来监管部门也在积极规范标准,2017年颁布了《工业控制系统信息安全防护指南》,2018年印发了《国家无人驾驶产业标准体系建设指南》、《国家无人驾驶产业标准体系建设指南》和《国家无人驾驶产业标准体系建设指南》。规定自动驾驶系统运营企业应从安全软件选择与管理、配置和补丁管理和边界安全防护等十一个方面做好工控安全防护工作。
从自动驾驶本身从业者来说,自动驾驶的构成是多个点到线到面的过程,那么自动驾驶的安全性也应该是多角度、多维度的堆砌。对于自动驾驶系统需要不停地及时进行补丁与维护,没有牢不可破的墙,但能有不断加固的盾,而对于追智能汽车内部来说,像中控门锁系统CDLS、轮胎压力监测系统TPMS等内部硬件系统的检修与加固也要重点布局。
而这个难度无疑也是随着技术的发展而不断升级,并且对于万物互联的Iot生态中,自动驾驶的车联网生态也是少数能直接威胁到用户人身安全的点,这也是自动驾驶未来发展的彷徨之一。
自动驾驶的5G“呐喊”
在自动驾驶的发展进程中,难免有着这样那样的问题与矛盾,但这并不意味着自动驾驶就无法克服,而且对于自动驾驶这种以技术发展为核心导向的技术,对社会生态的改变往往就像毛竹一样。
毛竹这种植物在其栽种后的最初五年中,你根本看不到它的生长。可是,五年之后,它就像被施了魔法,在半年时间里就会蹿到30多厘米。原因就在于毛竹5年中把所有的努力放在基层建筑下,其根部可以延伸几英里远。
自动驾驶的技术研究是一个长远且持续的深耕,但如果一旦成熟,其改变社会生态的速度也将是难以想象的。从PC到智能手机、从出租车到网约车等一系列生活习惯的改变都是在短短数年甚至数月内发生的,而自动驾驶在未来全面上线后,将会对交通的重构也是如今无法全面推测出的。
而当下就有一个全新的跳板。
2019年是5G的元年,全球都已经开始加快了在5G的基础设施建设。中国预计今年下半年就会开始试运行,明年则正式展开5G的商用进程。
国际化标准组织3GPP定义了5G技术的三大应用场景:eMBB(增强移动宽带)、mMTC(海量机器类通信)、uRLLC(高可靠低时延通信)。其中,uRLLC的主要应用场景就是无人驾驶领域。
5G低时延、高可靠的优势将赋能自动驾驶的进一步发展,自动驾驶的终极目标就是应用AI+IOT+5G的无人驾驶汽车。不管是目前的激光雷达还是摄像头采集,在复杂道路环境的感知方面速度会更快,做出实时决策的时间也会更加快。强大的通信支持可以有效的减少因为处理速度导致额交通事故发生。
如今自动驾驶达不到L5的级别,也无法拒绝有人介入到驾驶中。而自动驾驶想要摆脱方向盘,除了需要快速以及无延迟的网速,也需要庞大的数据库支撑。随着5G的应用,会加速其数据采集的过程。大量的数据累计,就可以不只是在遇到突发状况后快速的反应,也能够提前就做好对各种事件的预防。
而且自动驾驶如今也有在一些特定的场景进行着ToB的服务价值。
ToB的思维是如今互联网深入到中后期的重要举措,从B端的服务中可以给像VR、AI、大数据、云计算、自动驾驶等技术进行实际的落地体验,在其还未达到C端心理预期的情况下,在B端做一些力所能及的服务。
这样一方面可以给从业者一些信心与回报,盈利点也是持续付出的支柱;另一方面可以让用户与社会看到该技术的实际效果,从而提升用户的认可与接受程度,对未来的全面普及打基础。
就目前而言,自动驾驶在特定的场景,像旅游景点的游览车、自动请理街道的垃圾车等都是不错的场景运用。固定的路线既能起到实验的作用,也不会影响到人们的安全问题。未来物流用车、出租车、公交车等则是自动驾驶普及的下一个阶段。
德国哲学家马丁·海德格尔在其存在论名著《存在与时间》里面用理性的推理出了一个生命意义上的倒计时法—“向死而生”。
对于每一个技术与产品而言,存在都是具有阶段性的,无论是胶卷时代的终结、2G、3G技术的淘汰,我们看着一个个技术发展成为主流,再看着其被更新的技术所替代,每个技术与产品也始终在向死而生的道路上。
自动驾驶作为下一代的新兴技术,在发展的过程中难免会遇到许多彷徨,但如今的进步也是肉眼可见的。作为从业者也谨需铭记,循序而不急躁,等待并心怀希望,只要能够在逆境坚持,在困境中呐喊,属于自动驾驶的未来也会是璀璨的。

扫码关注
您身边的物联网卡专家











 欢迎来到 51物联卡
欢迎来到 51物联卡
发表评论